como su nombre lo dice es un robot que al subirle el código a la tarjeta innobot este seguirá una linea negra o blanca a continuación se da la imagen del código en bloques y se sube un vídeo de su funcionamiento.


practica de innobot con el carro de seguidor de linea
código del sensor de ultrasonido
este robot tiene un sensor de ultrasonido el cual se le asigno el código de que al ponerle un objeto al frente del robot este parara y al quitarle la mano el continuara su camino, a continuación se le da la foto del código y el vídeo de comprobación del código


practica-1 de innobot con el sensor ultrasonido
practica 2 de ultrasonido
este robot tiene el mismo sensor que el de el anterior pero tiene un programa distinto el cual este al colocarle el objeto al frente del robot debe esquivar el objeto a continuación se da la imagen del código y el vídeo de comprobación del código.
este robot tiene el mismo sensor que el de el anterior pero tiene un programa distinto el cual este al colocarle el objeto al frente del robot debe esquivar el objeto a continuación se da la imagen del código y el vídeo de comprobación del código.


"verificación de código para el ultrasonido
detector de obstáculos "
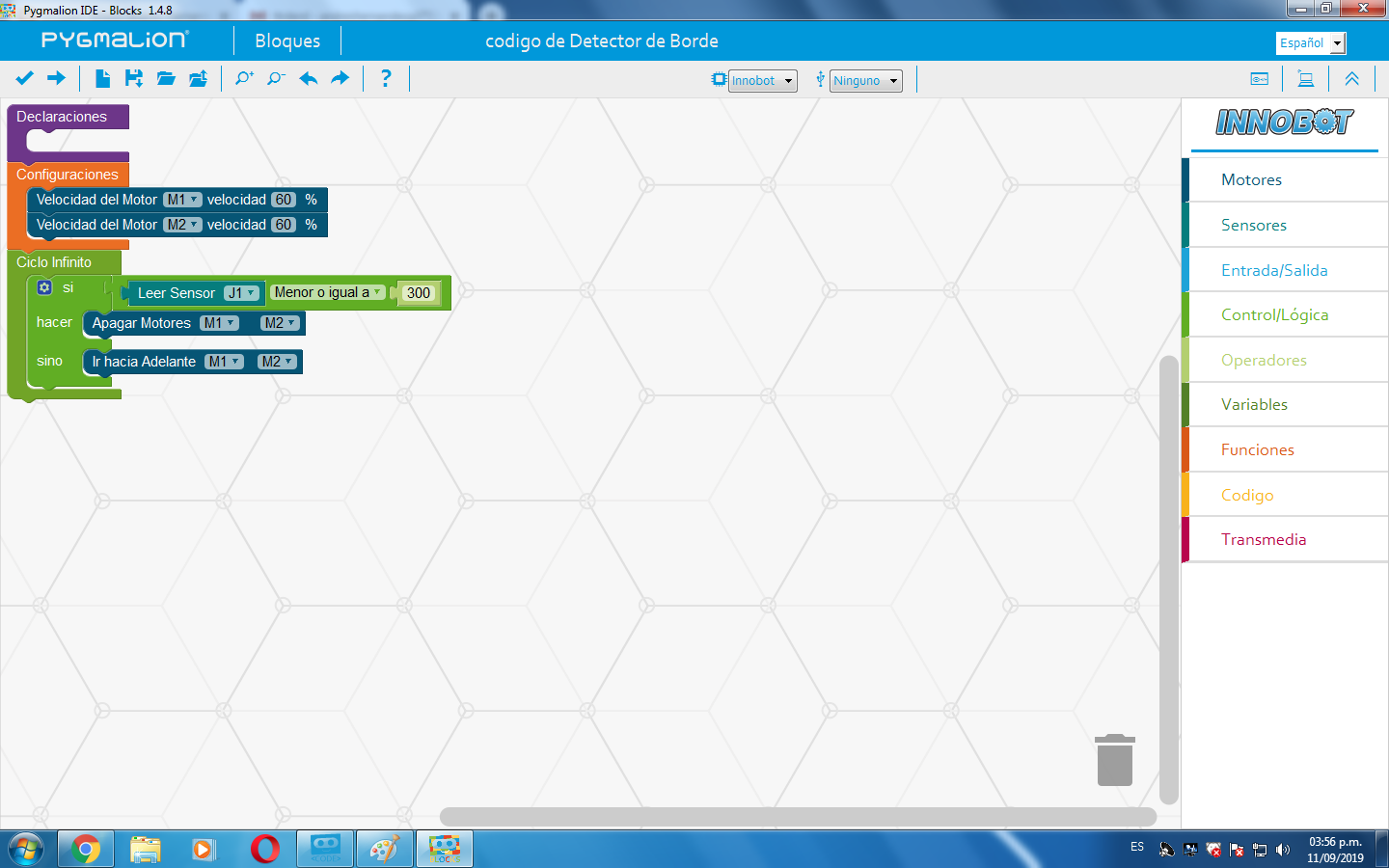
código de detector de borde
este robot tiene dos sensores el cual tiene el código de que si detectan un borde este robot debe para por completo a continuación se da la imagen del código y el vídeo de comprobación de el código
código del entre lineas
este código tiene dos sensores el cual ejercen la función de que tienen que ir por medio de dos lineas negras y al encontrársela no se debe salir de la linea negra a continuación se presenta la imagen del código y el vídeo de comprobación del código.
este código tiene dos sensores el cual ejercen la función de que tienen que ir por medio de dos lineas negras y al encontrársela no se debe salir de la linea negra a continuación se presenta la imagen del código y el vídeo de comprobación del código.

Código de recolector de objetos


este código esta hecho en código y no en bloques, este código es para subirlo a la tarjeta de bluetooth y que nos permita manejar nuestro robot por medio de la aplicación pygmalion.tech a continuación se presenta el código de la tarjeta y el vídeo de la comprobación del código.




Comprobación de que el código funcione .
Realización del código del tercer motor
este código es para que el tercer motor encienda y apague por medio de dos botones diferentes el cual este motor tendrá una especie de enlice y la función de este es apagar incendios"velas"a continuación se presenta la imagen del código y el vídeo de comprobación del código.

Código del robot fireboot
fabricación del robot fireboot
Este robot esta diseñado para apagar velas a una determinada altura y distancia y contiene un sensor de calor,dos servomotores, y un sensor de ultrasonido también se le ha agregado un motor para la respectiva hélice.
- Mejoras de takimochi se le ha ensamblado un piso



- Se ha ensamblado un motor a el tercer piso para hacer un reto




Empezamos a comprobar si el código nos esta sirviendo de la mejor manera
